Bump steer (or Roll steer) is a measure of wheel steer angle change with vertical suspension travel. Bump steer is a common tuning lever used in vehicle dynamics. In most cases it is tuned to give an understeer tendency on a suspension system (i.e. toe out on a front axle and toe in on the rear axle), but there can be exceptions to this.
In the design of any suspension system, it is wise to include the option for some bump steer adjustment. There are two main reasons for this. The first is to correct for any build tolerance during the suspension manufacture. The second is to fine tune the handling of the vehicle using an easily accessible tuner even after the vehicle is fully built and on the road.
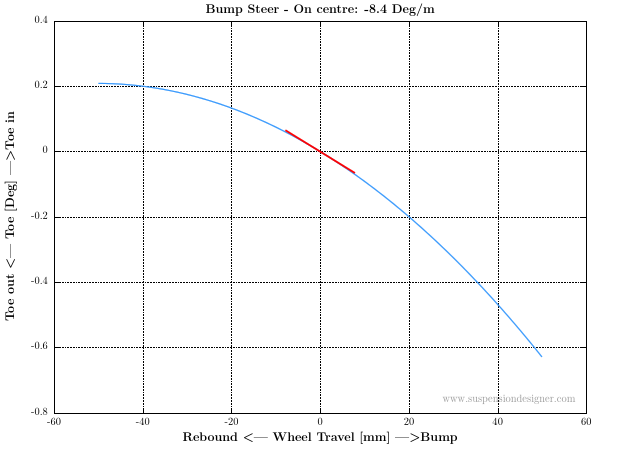
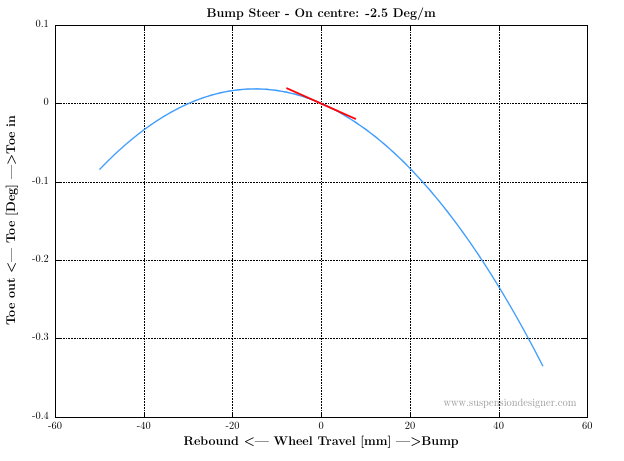
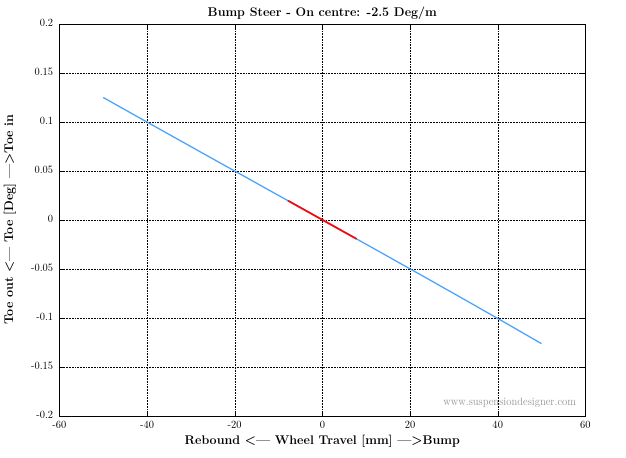
The second aspect to bump steer which can be overlooked is bump steer linearity. Linearity refers to the shape of a bump steer curve. In most cases it is desirable to have linear bump steer to give linear handling response on a vehicle with different levels of roll (toe angle change vs wheel travel is a straight line). Linearity will be explored as part of this tuning example.
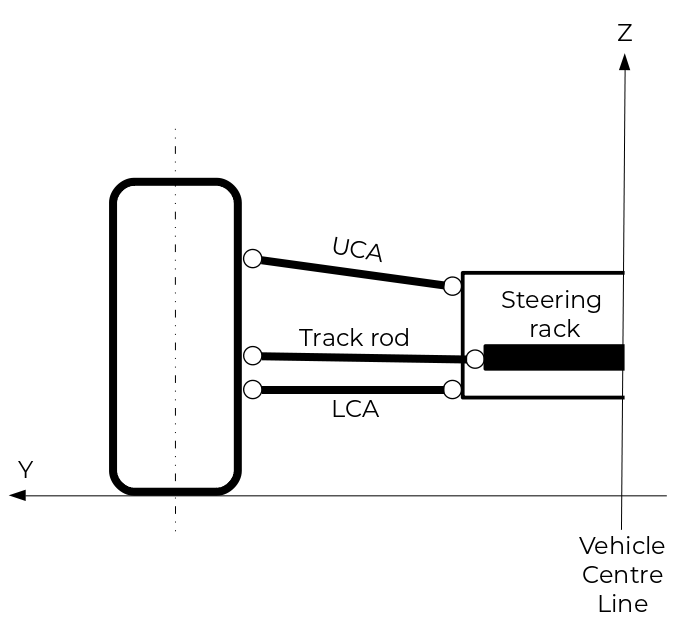
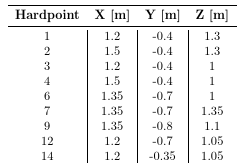
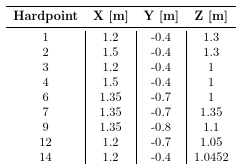
Bump steer is tuned on a suspension system by the positioning and length of the track rod relative to the other links in a suspension. In this example, a relatively simple double wishbone layout is simulated using RACE to explore the influence of the track rod position and length on bump steer. The goal is to design a suspension system with -2.5 Deg/m bump steer.